

信息中心


近日,“第十届软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛”在哈尔滨工程大学青岛创新发展基地成功举办。本次大会由哈尔滨工程大学主办,学院师生积极参与,在三场专题报告与创新设计竞赛中表现突出,充分展现了学院在软体机器人领域的科研实力与创新能力。
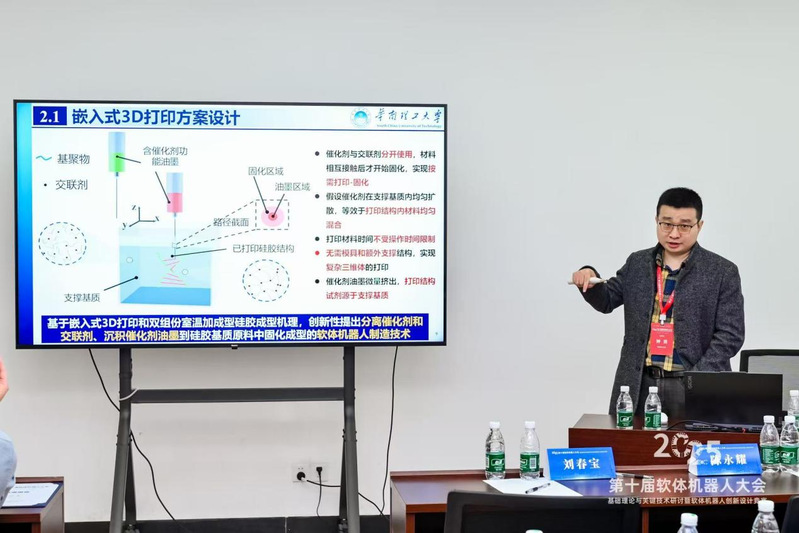
钟勇教授在”仿生软体机器人驱感一体化技术研究”报告中,针对传统分立式制造导致的集成难题,提出了基于嵌入式3D打印与催化剂扩散的“打印-固化”一体化制造新方法。该技术突破了材料与结构限制,实现了多功能材料的原位集成与复杂结构一体化成型,为智能软体机器人的高效制造提供了创新路径。

李云泉副教授以”基于光学遮挡结构的柔性三维力传感器设计与验证”为题,介绍了一种新型光学触觉传感器设计。该传感器利用结构变化引起的光线遮挡实现三维力的精准感知,具备高灵敏度与低成本优势,结合机器学习解耦模型,在机器人柔性抓取与交互任务中展现出良好的应用潜力。
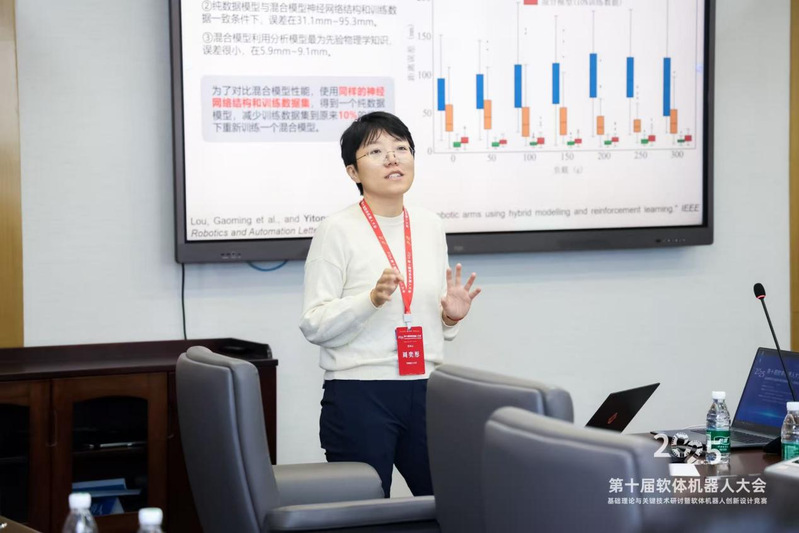
周奕彤副教授在”软体机器人的物理-数据混合建模与强化学习控制”报告中,系统分析了传统建模方法的局限性,并提出融合物理模型与数据驱动的混合建模新思路。面向六自由度软体机械臂,她进一步提出基于逆运动学模型的强化学习控制策略,有效提升了建模精度与控制效率。

软体机器人创新设计竞赛是本次大会的重要环节,共有75支来自全国各大高校和科研机构的队伍进入决赛。学院派出三支学生代表队,凭借出色的创意与扎实的技术基础,在激烈角逐中斩获佳绩。其中,由王晓广、鲜帅组成的硕博联合团队,凭借作品“可用于水下探测与抓取的仿生电鳐软体机器人平台”荣获机器人竞赛一等奖。在海报展示环节,鲜帅团队的作品“催化剂扩散赋能嵌入式3D打印:一体化柔性传感器与软体机器人的一步制造”荣获二等奖,徐博易、莫礼燕团队的作品均获得优秀奖。
自2015年由浙江大学发起以来,软体机器人大会已成功举办十届。会议始终致力于为师生搭建技术与思想交流的平台,现已成为国内软体机器人研究领域的重要学术活动。本届大会吸引了来自国内外多所顶尖高校和科研机构的专家学者与学生参加,共同探讨软体机器人领域的前沿课题与创新设计。
通过本次大会,学院师生充分展示了在软体机器人领域的创新研究成果与扎实技术实力。未来,学院将以此为起点,锚定学校加速挺进全球百强大学的建设目标和学院学科的发展目标,聚焦“机器人+”学科建设,持续优化“156+X”特色交叉学科群,在多个工业应用场景,包括智造、医疗、交通、农林、低空经济,强化科技创新和成果落地,助力学校“双一流”建设与高水平科技自立自强。(图片/第十届软体机器人大会组委会 文字/吴贤铭智能工程学院)
