

信息中心


2025年10月19日至25日,全球机器人与智能系统领域的顶级盛会-IEEE IROS 2025(IEEE Intelligent Robots and Systems 2025)在杭州国际博览中心隆重举行。本届大会汇聚逾7000位来自机器人、人工智能与自动化领域的顶尖专家、学者及企业代表,共同探讨最前沿的研究成果与技术进展。学院院长陈小奇院士、钟勇教授、周奕彤副教授、李云泉副教授、吴凯副教授、王恒副教授团队作前沿报告,充分展示了学院在机器人设计、感知与控制等方面的最新研究进展。

参会师生合影
陈小奇院士主持了智能避障技术分会场,汇聚了移动小车、机械臂、无人机等多个领域的最新研究成果。会议内容涵盖了从路径规划、动态避障算法到多传感器融合感知与控制优化等前沿方向,展示了智能体在复杂环境下的自主决策与协同能力。该会场为不同系统间的避障技术提供了跨领域的交流平台,推动了智能机器人与无人系统的安全控制与应用发展。陈小奇院士团队硕士研究生林航宇做了题为“基于二次型求解的模式隔离加速度引导势场进行动态避障”的口头汇报,该研究提出模式隔离速度引导算法,在二次规划框架中引入双模式隔离策略与速度引导势场,实现任务执行与避障的动态分离。算法通过速度引导实现平滑避障,显著提升系统稳定性与实时性。该方法为复杂动态环境下机器人安全自主运动提供了新思路,具有广阔的应用前景。
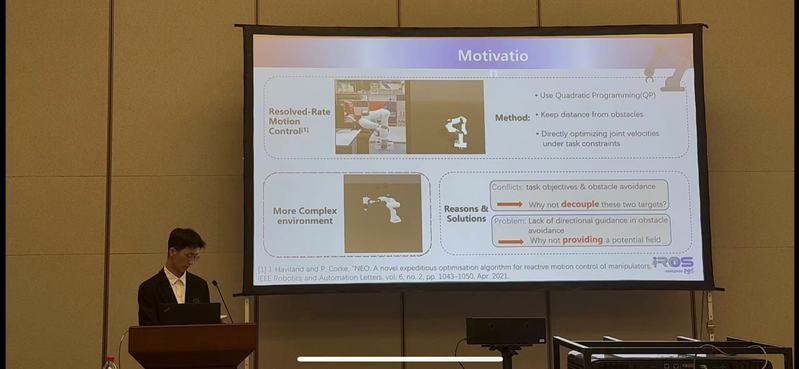
林航宇作口头汇报
钟勇教授担任“机构与控制”分会场主席,其团队博士研究生刘浩然分享了一种可调节主动/被动部分比例的连续体驱动体鱼形推进器。并通过实验研究该比例和尾部刚度与摆动频率的动态匹配,以优化推进性能。为柔性水下推进器提供新方案。并分享了一种新型仿生电鳐机器鱼。其创新性结合MPF和BCF两种推进模式,兼具高速运动和机动性,并能够利用胸鳍实现水下物体的抓取和运输功能。

周奕彤副教授作报告
周奕彤副教授先后带来了两场精彩的报告。首场报告聚焦于“可穿戴柔性外骨骼机器人”的前沿探索,介绍了课题组在柔性外骨骼研究成果,包括用于康复治疗的手部、腕部柔性外骨骼,以及面向工业场景的用于高塔攀爬的柔性外骨骼系统,该报告荣获Soft Frontier Speaker Award。随后,周奕彤副教授又以“三维变曲率软体执行器的设计方法”为题,围绕软体机器人在复杂三维变曲率设计的挑战与解决方案展开报告,该工作通过调控预应力在软体执行器中的空间分布实现软体执行器的曲率和刚度可编程,进一步设计仿鹰爪软体抓手并集成于无人机,实现无人机的悬停与空中抓取,具有能耗低、抓取力大、抓取覆盖率高等优点,获得了与会专家学者的高度评价。
李云泉副教授作报告
李云泉副教授围绕触觉感知与变刚度多模态抓取方向,分享了团队近期的两项研究成果,分别为“A Compact, Cost-Effective, and Highly Sensitive Optical Blocking Structure (OBS) Tactile Sensor for Enhanced Robotic Grasping”和“Autologous Variable-Stiffness Soft Finger Based on Cross-Layer Jamming for Multimode Grasping”。报告重点介绍了所提出的光学遮挡结构触觉传感器在结构简化、灵敏度提升以及抓取稳定性增强方面的技术优势,以及基于层间阻塞效应的自适应变刚度软指在复杂多模态抓取任务中的性能表现。会后交流环节讨论气氛热烈,参会学者就传感器集成设计、结构驱动策略及潜在应用场景等内容进行了深入探讨,进一步展示了学院在柔性触觉感知与仿生机器人领域的最新研究进展。
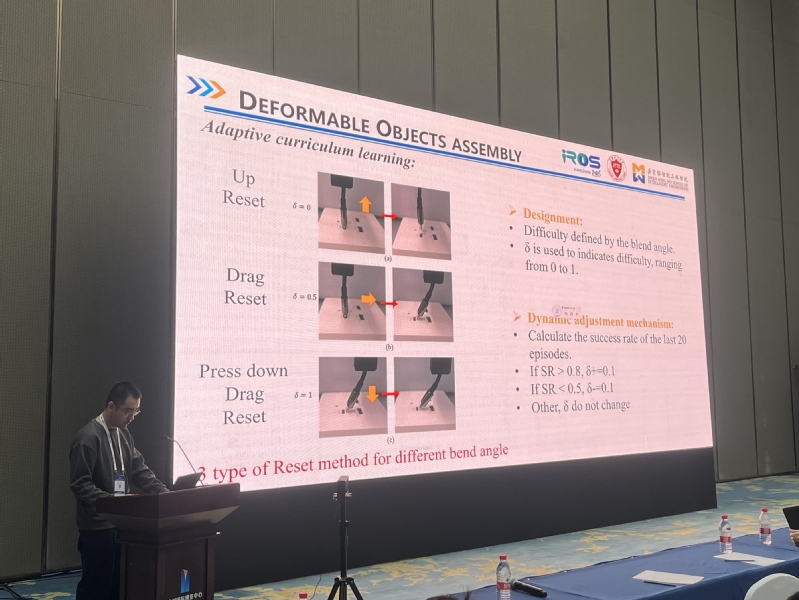 陈琦作口头汇报
陈琦作口头汇报
吴凯副教授团队的论文“Robotic Assembly of Deformable Linear Objects via Curriculum Reinforcement Learning”在IROS 2025会议上进行展示,其团队博士研究生陈琦进行口头汇报,介绍了柔性线缆装配面临的挑战以及课程强化学习在线缆装配方面的应用,并在海报展示环节与参会学者进行了深入学术交流,展现了学院在具身学习精细化操作方向的最新研究进展。
刘骕骐作口头汇报
王恒副教授团队博士研究生刘骕骐做了题为“基于软磁体的六自由度无线磁定位系统”的口头汇报,该工作通过设计三轴非对称的软磁体形状,使软磁体在电磁线圈的激励下产生各向异性磁化,从而实现了软磁体磁场对其旋转运动的响应,基于软磁体磁场测量可以对软磁体全六自由度位姿进行准确估计。该工作提出的软磁定位系统结合了传统永磁和电磁定位系统的优点,是一种无源、无线、无辐射、抗干扰的新型磁定位方法,在腔内微创手术导航中具有广阔的应用前景。
通过本次大会,吴院师生充分展示了在机器人与智能制造领域的创新研究成果和前沿技术实力。未来,学院将以此为起点,锚定学校加速挺进全球百强大学的建设目标和学院学科的发展目标,持续优化“156+X”特色交叉学科群,在多个工业应用场景,包括智造、医疗、交通、农林、低空经济,强化科技创新和成果落地,助力学校“双一流”建设与高水平科技自立自强。(图文/吴贤铭智能工程学院)
