

师资队伍


 |
|职称:副教授
邮箱:zhouyitong@scut.edu.cn
工作单位:吴贤铭智能工程学院
邮政编码:510640
毕业院校:俄亥俄州立大学
办公室:D1-a503
最后学位:博士
办公电话:020-81182129
导师类别:博导
周奕彤,博士,华南理工大学吴贤铭智能工程学院副教授,博士生导师。2011年本科毕业于清华大学车辆工程系,2020年在美国俄亥俄州立大学获得机械工程博士学位和应用统计学硕士学位。现主持国家自然科学基金(青年科学基金)项目、广州市基础与应用基础研究项目、校企合作项目等多个科研项目。曾作为骨干完成美国国家科学基金委、本田北美研发中心资助的多项科研项目。入围2022年机器人与仿生学国际会议(IEEE ROBIO)最佳论文奖(指导老师),2022年机构与机器人期刊(ASME JMR)最佳论文奖。在IEEE TRO/IEEE TIM/IEEE Sensors/ASME JMR/RAL/ICRA/IROS等机器人旗舰期刊和会议发表30余篇研究论文。
招收候选人专业背景:机器人工程、机械工程、力学、控制工程等。对课题组感兴趣的本科生/硕士生/博士生/博士后候选人请发送电子邮件,包括当前简历、成绩单、研究兴趣。
2021年3月-至今,华南理工大学,吴贤铭智能工程学院,副教授。
2011年7月-2014年4月,广汽研究院,机械工程师。
2007-2011 本科, 清华大学,车辆工程系
2014-2016 硕士, 俄亥俄州立大学哥伦布分校,机械工程系
2016-2020 硕士, 俄亥俄州立大学哥伦布分校,应用统计系
2016-2020 博士, 俄亥俄州立大学哥伦布分校,机械工程系
我们致力于新型软体机器人的设计方法、前沿理论与实验研究。提出人工肌肉、软体致动器的创新构造方法与制造工艺,研究致动器的多物理场的机理模型,实现优异的驱动性能;研究软体致动器的智能控制;研发新型服务机器人和可穿戴机器人,努力推动在医疗康复、电力、农业场景的落地。
人工肌肉
通过高分子材料制备新型电动人工肌肉,提出人工肌肉的构造方法与制造工艺;揭示结构、工艺参数对人工肌肉负载、行程、能量效率的作用机制;实现优异的力学和电学性能,探究人工肌肉连续制备的普适性方法,实现产业应用。
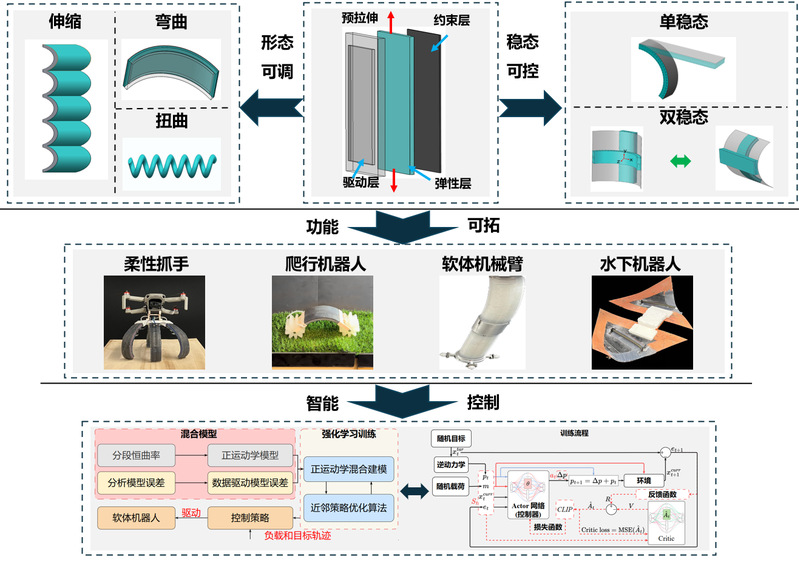
软体机器人
设计和建立软体执行器的设计理论;揭示组成、结构、工艺对软体执行器的能量调控机理;发展基于人工智能的软体机器人的建模和控制方法。
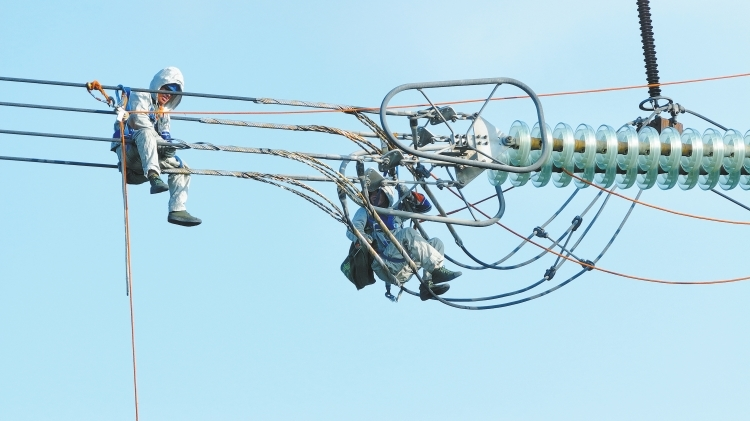
电力服务机器人
面向电力产业中机器替人的迫切需求,开发电力巡检、操作机器人;研发高压电线操作机器人,实现多种附件的带电破拆与更换;研发排管内电缆巡检机器人,实现线上巡检、三维空间重建与狭窄空间操作;研发辅助攀爬外骨骼,提升攀爬安全性。
设计与制造II、数据分析建模
1.Taghipour, Ehsan, Sai Siddhartha Vemula, Zhengdi Wang, Yitong Zhou, Hossein Qarib, Kushal Gargesh, Leon M. Headings, Marcelo J. Dapino, and Soheil Soghrati. 'Characterization and computational modeling of electrical wires and wire bundles subject to bending loads.' International Journal of Mechanical Sciences 140 (2018): 211-227. https://doi.org/10.1016/j.ijmecsci.2018.03.009
2.Zhou,Yitong, Leon M. Headings, and Marcelo J. Dapino. 'Discrete layer jamming for variable stiffness co-robot arms.' Journal of Mechanisms and Robotics 12, no. 1 (2020): 015001. https://doi.org/10.1115/1.4044537
3.Zhou, Yitong*, and Haonan Li. 'A scientometric review of soft robotics: Intellectual structures and emerging trends analysis (2010–2021).' Frontiers in Robotics and AI 9 (2022): 868682. https://doi.org/10.3389/frobt.2022.868682
4.Zhou, Yitong, Leon M. Headings, and Marcelo J. Dapino. 'Modeling of fluidic prestressed composite actuators with application to soft robotic grippers.' IEEE Transactions on Robotics 38, no. 4 (2022): 2166-2178. https://doi.org/10.1109/TRO.2021.3139770
5.Xiao, Longya, Chengjian Ou, Ding Zhang, Yi Ma, Zefeng Xu, Yitong Zhou*, and Hongjie Jiang. 'Strong Tough Poly Acrylic‐co‐acrylamide Hydrogels via a Synergistic Effect of Fiber and Metal‐Ligand Bonds as Flexible Strain Sensors.' Macromolecular Materials and Engineering 307, no. 11 (2022): 2200389. https://doi.org/10.1002/mame.202200389
6.Zhou, Yitong, Leon M. Headings, and Marcelo J. Dapino. 'Modeling of soft robotic grippers integrated with fluidic prestressed composite actuators.' Journal of Mechanisms and Robotics 14, no. 3 (2022): 031001. https://doi.org/10.1115/1.4052699
7.Li, Fengguan, Jiahong Chen, Zhitao Zhou, Jiefeng Xie, Zishu Gao, Yuxiang Xiao, Pei Dai, Chanchan Xu, Xiaojie Wang, and Yitong Zhou*. 'Lightweight soft robotic glove with whole-hand finger motion tracking for hand rehabilitation in virtual reality.' Biomimetics 8, no. 5 (2023): 425. https://doi.org/10.3390/biomimetics8050425
8.Gan, Lu, Jiabao Wang, and Yitong Zhou*. 'A sub-millinewton resolution biaxial force sensor with temperature self-compensation for vascular intervention.' Sensors and Actuators A: Physical 364 (2023): 114833. https://doi.org/10.1016/j.sna.2023.114833
9.Li, Fengguan, Jiahong Chen, Guanpeng Ye, Siwei Dong, Zishu Gao, and Yitong Zhou*. 'Soft robotic glove with sensing and force feedback for rehabilitation in virtual reality.' Biomimetics 8, no. 1 (2023): 83. https://doi.org/10.3390/biomimetics8010083
10.Gan, Lu, Jiabao Wang, and Yitong Zhou*. 'A sub-millinewton resolution biaxial force sensor with temperature self-compensation for vascular intervention.' Sensors and Actuators A: Physical 364 (2023): 114833. https://doi.org/10.1016/j.sna.2023.114833
11.Li, Fengguan, Jiahong Chen, Zhitao Zhou, Jiefeng Xie, Zishu Gao, Yuxiang Xiao, Pei Dai, Chanchan Xu, Xiaojie Wang, and Yitong Zhou*. 'Lightweight soft robotic glove with whole-hand finger motion tracking for hand rehabilitation in virtual reality.' Biomimetics 8, no. 5 (2023): 425. https://doi.org/10.3390/biomimetics8050425
12.Li, Haonan, and Yitong Zhou*. 'An Intelligent Hand-Assisted Diagnosis System Based on Information Fusion.' Sensors 24, no. 14 (2024): 4745. https://doi.org/10.3390/s24144745
13.Fang, Shengchang, Guisong Chen, Yitong Zhou*. and Xiaojie Wang. 'Advancing Legged Wall Climbing Robot Performance Through Dynamic Contact-Integrated Climbing Model.' Journal of Mechanisms and Robotics 16, no. 6 (2024). https://doi.org/10.1115/1.4064742
14.Xu, Zefeng, Jiaqiao Liang, and Yitong Zhou*. 'Soft Pneumatic Helical Actuators With Programmable Variable Curvatures.' IEEE Robotics and Automation Letters , vol. 9, no. 7, pp. 6632-6639, July 2024, https://doi.org/10.1109/LRA.2024.3410165
15.Xu, Zefeng, Linkai Hu, Longya Xiao, Hongjie Jiang, and Yitong Zhou*. 'Modular soft robotic crawlers based on fluidic prestressed composite actuators.' Journal of Bionic Engineering 21, no. 2 (2024): 694-706. https://doi.org/10.1007/s42235-024-00487-6
16.Gan,Lu, Yuqing Xu, Yumeng Cai, and Yitong Zhou*. 'A high sensitivity flexible stretchable fiber optic sensor based on the waveguide loss principle,' IEEE Transactions on Instrumentation and Measurement,vol. 74, pp. 1-7, 2025 https://doi.org/10.1109/TIM.2024.3522407
17.Dai, Pei, Pengyu Wang, Lu Gan, Yitong Zhou*. 'Supercoiled Polymer Sensors from Twisting and Coiling Silver-Plated Nylon tdreads'. IEEE Sensors Journal ,vol. 24, no. 19, pp. 29745-29753, 1 Oct.1, 2024 https://doi.org/10.1109/JSEN.2024.3441630
18.Lou, Gaoming, Chuang Wang, Zefeng Xu, Jiaqiao Liang, and Yitong Zhou*. 'Controlling Soft Robotic Arms Using Hybrid Modelling and Reinforcement Learning.' IEEE Robotics and Automation Letters,vol. 9, no. 8, pp. 7070-7077, Aug. 2024 https://doi.org/10.1109/LRA.2024.3418312
19.Xu, Zefeng, and Yitong Zhou*. 'Bistable composites with intrinsic pneumatic actuation and non-cylindrical curved shapes.' Materials Letters 354 (2024): 135381. https://doi.org/10.1016/j.matlet.2023.135381
20.Xu, Boyi, Jinsui Xu, et al., FeiYang*, Yitong Zhou*. “Bionic Muscle with Dual-Mode Sensing Function Inspired byPlant Tendrils,” ACS Applied Electronic Materials 2025 7 (5), 2137-2145 https://doi.org/10.1021/acsaelm.5c00105
21.Xu, Boyi, Jinsui Xu, et al., FeiYang*, Yitong Zhou*. “Spider inspired ion gel sensor for dual-mode detection of force and speed via magnetic induction,” ACS sensors 2025 10 (4), 3134-3142 https://doi.org/10.1021/acssensors.5c00403
22.Xu, Boyi, Jinsui Xu, et al., FeiYang*, Yitong Zhou*. “Ant-Inspired Ion Gel Sensor for Dual-Mode Detection ofForce and Humidity via Magnetic Induction,” ACS sensors 2025 10 (3), 2319-2329 https://doi.org/10.1021/acssensors.5c00032
23.Liang, Jiaqiao, Gaoming Lou, Fobao Zhou, Yumeng Cai, Chuang Wang, Yitong Zhou*. 'Residual Reinforcement Learning Based on Inverse Kinematic Modeling for Soft Robotic Arm Control.' ASME Journal of Dynamic Systems, Measurement, and Control. DS-24-1244,June 9, 2025 https://doi.org/10.1115/1.4068880
1. 一种摩擦电式湿度压力双模态传感器及其测试方法,2024116657835
2. A wearable flexible rehabilitation device for wrist joints based on twisted string actuators, 2023226757347
