

近日,第十四届全国海洋航行器设计与制作大赛、第二届船舶与海洋工程类教师教学创新大赛、首届全国青少年海洋航行器竞赛在武汉理工大学举办。我院学生代表队表现优异,包揽全国特等奖、一等奖和二等奖等多项奖项,展现了学院创新人才培养实力和突出成效。
本届大赛由中国船舶集团有限公司、中国造船工程学会、国际船舶与海洋工程创新与合作组织联合主办,中国高等教育学会支持,是我国船舶与海洋工程领域级别最高、规模最大、覆盖面最广的竞赛之一。大赛吸引了来自上海交通大学、哈尔滨工程大学、华南理工大学、大连理工大学等近400所学校、科研院所的3345支队伍、16000余名学生同台竞技。
参赛团队合影
经过华南区域赛的选拔,我校共7支队伍成功晋级全国总决赛。在国赛现场,选手们通过视频展示、PPT讲解、实物演示等多种形式,向评审专家详细阐述了作品的设计理念、技术特色与应用前景,充分展现出对船舶与海洋工程领域技术的深刻理解和钻研,体现了独特的创新思维和工程实践能力。
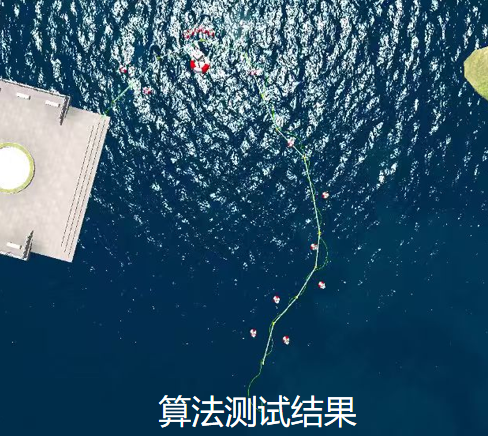
特等奖作品“海洋守护者-渐进多源注意力双Q无人船智能导航算法”
其中,“海洋守护者”团队凭借作品“海洋守护者-渐进多源注意力双Q无人船智能导航算法”再获佳绩,继去年获特等奖后,今年再获智能导航赛道特等奖。该作品聚焦智能导航中训练效率低、奖励引导不足,以及复杂环境下避障和路线规划精度不够等问题,创新设计了“三阶递进”技术架构,实现高精度避障和路线规划,这一架构让无人船在长距离航行和动态避碰时性能全面优化。优化后的模型训练速度更快,学习和适应能力更强,在静态和动态环境中都能灵敏、稳定地自主航行。该成果实用性强,落地潜力大,未来可广泛用于开阔水域的无人船/艇自主作业,为智能化水上作业系统的快速应用提供了可靠技术支持。

一等奖作品“华工智能无人艇团队-恶劣海况下的多模态传感器融合智能感知算法”
一等奖作品“华工智能无人艇团队-恶劣海况下的多模态传感器融合智能感知算法”针对海上大雾等恶劣天气中视野受限、普通视觉识别效果差的问题,提出视觉、激光雷达和红外相机融合的感知方法。通过优化视觉图片处理和识别模型,提升雨雾中模糊目标的识别精度;改进红外图像分割网络,实现船舶与背景的精准分离;再优化激光雷达点云识别算法,提高目标检测率。借助多传感器联合标定,最终实现对海上目标的多维度精准感知,显著提升了无人艇在复杂环境下的自主识别能力。
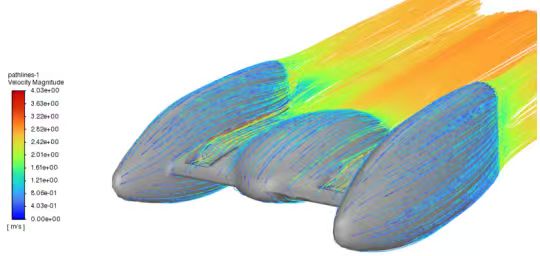
二等奖作品“华工智航——双模态抗恶劣海况无人艇”
二等奖作品“华工智航——双模态抗恶劣海况无人艇”则致力解决高海况环境下小型无人艇的稳定性与持续作业难题。该作品采用多体对称式双模态航行架构,通过StarCCM+高精度流固耦合分析验证了艇体在极端海况下的流体动力性能,创新设计自适应滑模控制算法替代传统控制方式,实现无人艇在水面/水下双模式切换时动态响应优化与更强的抗干扰控制能力,搭配全对称防翻艇体和备用推进系统,保障了恶劣环境下的稳定作业。(图文/肖国权)
附:华南理工大学学生代表队获奖名单
参赛类别 | 作品名称 | 团队成员 | 指导老师 | 学院 | 获奖等级 |
智能导航 | 海洋守护者-渐进多源注意力 双Q无人船智能导航算法 | 饶瑞杰、孙灿林、温世顺、黄乐、肖尔博 | 洪晓斌 肖国权 | 机械与汽车工程学院 | 特等奖 |
海上智能感知 | 华工智能无人艇团队-恶劣海况下的 多模态传感器融合智能感知算法 | 姚文韬、颜于博、张中凯、余玥、王灵锋 | 洪晓斌 陈远明 | 机械与汽车工程学院 | 一等奖 |
新概念创意设计 | 华工智航-双模态抗恶劣海况无人艇 | 黄乐、陈智杰、陈伟、何卓夏、池秋睿 | 洪晓斌 陈远明 | 机械与汽车工程学院 | 二等奖 |
新概念创意设计 | 华船·山海经行队 | 黄嘉硕、彭佳欣、聂祖立、黄强、叶冰旭 | 周斌珍 金鹏 | 土木与交通学院 | 一等奖 |
新概念创意设计 | 稀土海疆探索者 | 赵扬、乌浩瑄、王湫淇、向建青、潘章评 | 杨乐乐 | 土木与交通学院 | 一等奖 |
名船名舰仿真 | 华船之鲤 | 谢帆、刁江豪、郑茗赫、谢宙、谢腾 | 周斌珍 袁煜明 | 土木与交通学院 | 二等奖 |

