

INFORMATION CENTER


On the afternoon of January 9, 2026, the annual innovation assessment for the graduate courses Frontiers in Intelligent Manufacturing Engineering and Frontiers in Intelligent Control Engineering – the Masters in Five academic presentationfinal – took place in Lecture Hall D1-b110 at the Guangzhou International Campus. Eight finalists each had five minutes topresent on core topics from their courses, outlining their research significance, technical approach, and preliminary results. The fast-paced format showcased the scientific thinking and presentation skills of these young scholars.

Event Review: Fast-Paced, Idea-Dense
As an innovative assessment for the two courses, Mastersin Five prioritizes clarity over quantity. Presenters focused on: thecore problem and its background; the scientific and engineering value; the coremethods and validation; and preliminary results, challenges, and next steps.
With clear structure, concise language, and engaging delivery,the contestants broke down key issues in intelligent manufacturing and controlinto understandable narratives. From new embodied intelligence paradigms todual-laser hybrid processing, from methodological innovation to engineering application, each five-minute slot was packed with impactful ideas.
Finalist Showcase
He Chang:Introduced model-based reinforcement learning, drivenby world models like Dreamer, for biomimetic fish control. By imaginationreplay in latent space to learn hydrodynamics, the method achieves highsample efficiency with limited real data, using offline pre-training +online fine-tuning to bridge the simulation-to-reality gap.

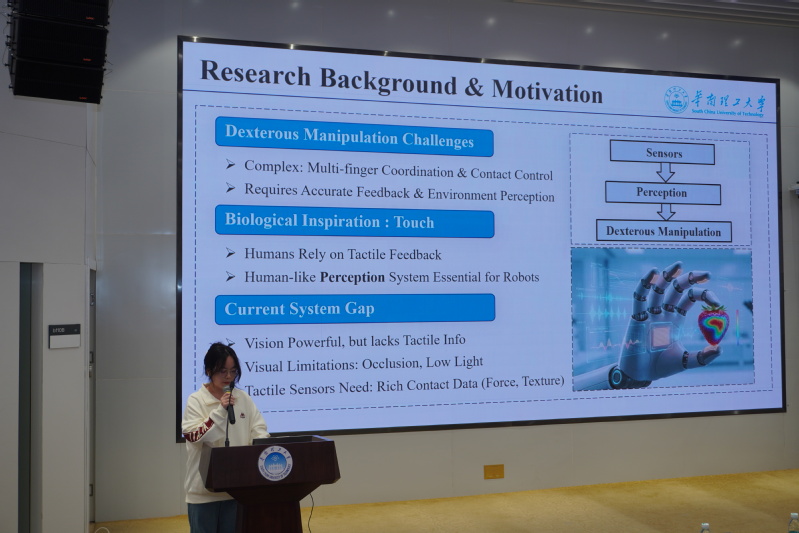
Xiong Yifei: Addressed the perception gap between global but occludable vision and precise but local touch. She proposed a unifiedvisuotactile fusion framework aligning visual point clouds with tactile features, enabling occlusion-aware object pose estimation, slip detection, andclosed-loop adaptive grasp control, moving from visual planning to tactile reflex for robust real-time grasping.
Yin Chuqin: Presented a convex optimization-based framework forco-designing control barrier functions and controllers. By decoupling the traditionally non-convex problem into a solvable LMI form via variable substitution, and explicitly incorporating actuator saturation constraints, itachieves a computationally efficient, single-step safe-critical control with formal safety guarantees.

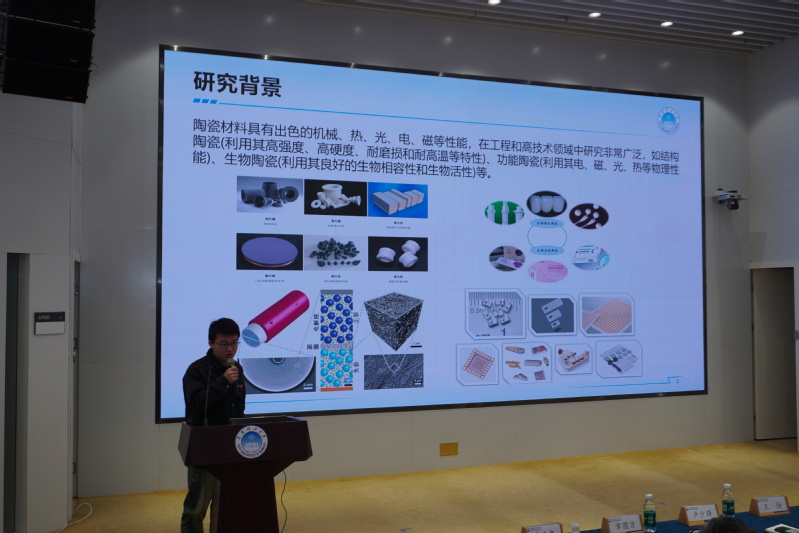
Wang Jinbiao: Tackled the warping inconsistency in laser-cutalumina ceramic sheets. Using thermal-structural coupling simulations with a Gaussian heat source, he quantitatively compared temperature fields, thermal stress, and warpage for different geometries, investigating the warping mechanism to guide structural and process optimization.
Li Wenjun: Systematically summarized and compared optimization strategies for the draft and verification stages of thedraft-verify paradigm in Speculative Decoding, revealing the key paths to significant inference acceleration while preserving the output distribution.

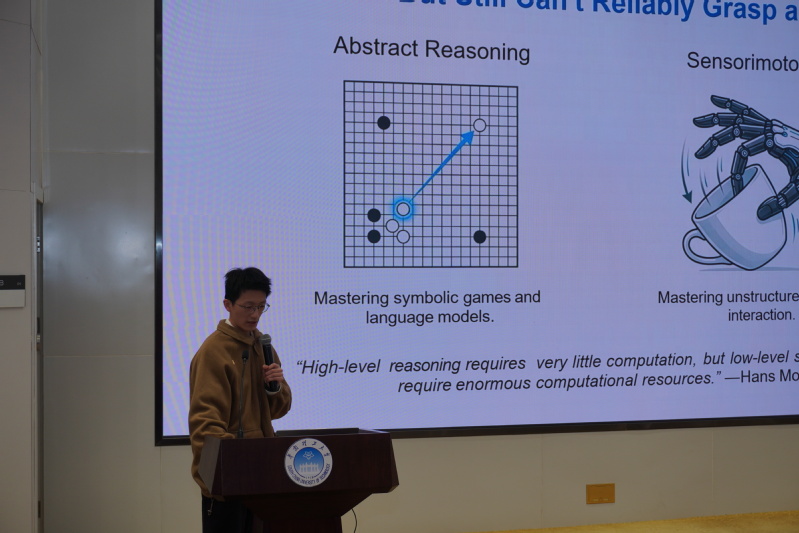
Lin Hangyu: Enhanced real-time stability of generative manipulation policies like π0 using Flow Matching, integrated with vision-language-action models to imbue robots with semantic understanding and common sense. This proposes a new brain (reasoning) + body(execution) collaborative paradigm for embodied intelligence, moving toward general-purpose physical agents.
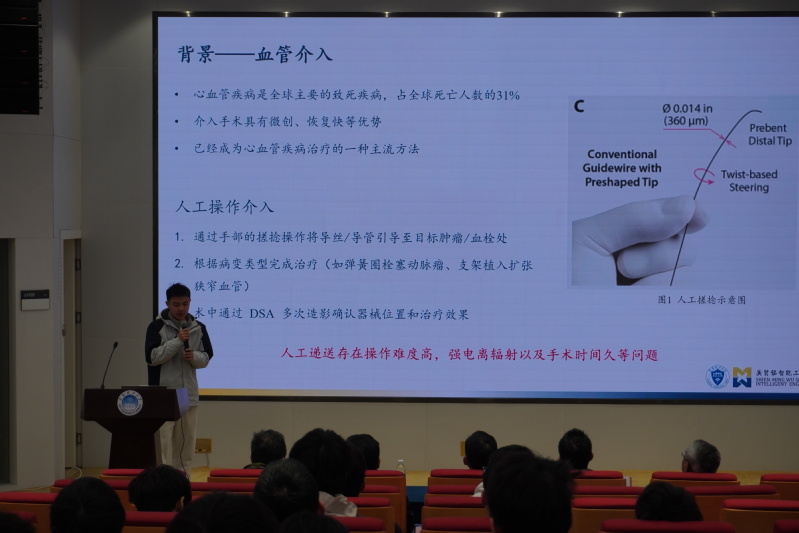
Zhang Zhixing: Developed a magnetically-driven vascular intervention robot system. Integrating visual feedback with imitation learning enables autonomous guidewire navigation and delivery, validating fully autonomous intervention feasibility without precise vascular modeling orhigh-risk reinforcement learning exploration.
Fang Di: Tackled key online continual learning challenges:catastrophic forgetting, class imbalance, mixed data streams, and zero privacy.Based on analytical continual learning, he proposed an analytical imbalance correction framework requiring no sample replay, theoretically grounded in theidea that balancing losses can unfairly penalize certain classes,aiming for fairer, more privacy-friendly continual learning.
Judging Perspective: Evaluating Research and Presentation
The judging panel, consisting of four faculty members, focusedon both research quality and presentation effectiveness. Key criteria included:a clear problem-driven approach, a coherent and verifiable technical approach,accurate and well-defined articulation of key contributions, and a structured,information-dense presentation.

In his post-competition comments, Academician Chen Xiaoqi highlighted that the Masters in Five final fully demonstrated thegraduate students' cutting-edge vision and research skills in intelligent manufacturing and embodied intelligence. He noted the topics were closely aligned with industrial needs, the research showcased interdisciplinary integration and innovation, and the presentations were precise, efficient, and logically clear. He encouraged students to continue strengthening their foundational knowledge and core algorithmic skills while focusing on application, and touphold ethical standards and social responsibility to better serve industrial upgrading and sustainable development.

Award Winners
The final competition results were as follows:
Frontiers in Intelligent Science and ControlEngineering
First Prize:
Lin Hangyu: From Computation to Embodiment: A New Paradigm for Robot Manipulation in the Era of Generative AI - Addressing Moravec's Paradox and the Emergence of Physical Intelligence
Second Prize:
Li Wenjun:Speculative Decoding: An Acceleration Method for Transformer-based Large Language Models
Third Prize:
Zhang Zhixing: A Magnetically-Driven Vascular Intervention Robot System with AI and Autonomous Navigation Strategies
Fang Di: Continual Learning in the Real World: A Brief Overview of My Research Field

Frontiers in Intelligent Manufacturing Engineering
First Prize:
Xiong Yifei: Adaptive Robotic Grasping Based on Visual-Tactile Multi-Modal Fusion
Second Prize:
He Chang: Bio-mimetic Fish Control Based on Reinforcement Learning: A High Sample Efficiency Control Framework Using World Models
Third Prize:
Wang Jinbiao:Analysis of Warpage Phenomena in Laser-Processed Alumina Ceramic Sheets
Yin Chuqin: Convex Co-Design Based on Control Barrier Functions for Safety-Critical Control

Five minutes is a short time, yet sufficient to bring are search problem into focus and make a line of thinking understood.Masters in Five is more than just a course assessment; it's a form of communication training for a real-world audience in both industry and academia. It challenges students to identify problems at the frontier, validate methods through engineering, and articulate their contributions with clarity.We look forward to the next gathering, where we can once again celebrate innovation and empower the future!(Text/Photos: Shien-Ming Wu School of Intelligent Engineering)
