

INFORMATION CENTER


From October 19 to 25, 2025, the prestigious IEEE International Conference onIntelligent Robots and Systems (IROS 2025) was held at the Hangzhou International Expo Center. This premier global event brought together over7,000 leading experts, scholars, and industry representatives in robotics,artificial intelligence, and automation to share cutting‑edge research and technological advances. Teams led by Academician Chen Xiaoqi, Professor Zhong Yong, Associate Professors Zhou Yitong, Li Yunquan, Wu Kai, and Wang Heng delivered frontier presentations, showcasing the school’s latest progress inrobot design, perception, and control.

GroupPhoto of Participating Faculty and Students
Academician Chen Xiaoqi chaired a technical session on intelligent obstacle avoidance,highlighting recent advances in mobile robots, robotic arms, drones, and otherfields. Topics ranged from path planning and dynamic obstacle‑avoidancealgorithms to multi‑sensor fusion perception and control optimization,demonstrating autonomous decision‑making and coordination capabilities incomplex environments. The session fostered cross‑domain dialogue onobstacle‑avoidance techniques, promoting safer and more applicable intelligentrobotic and unmanned systems. Master’s student Lin Hangyu from Chen’s team presented an oral report titled “Dynamic Obstacle Avoidance viaMode‑Isolated Acceleration‑Guided Potential Field Based on Quadratic Programming.” The proposed mode‑isolated velocity‑guided algorithm introduces adual‑mode isolation strategy and velocity‑guided potential field within a quadratic programming framework, enabling dynamic separation between task execution andobstacle avoidance. By achieving smooth avoidance through velocity guidance,the method significantly enhances system stability and real‑time performance,offering a promising new approach for safe autonomous robot navigation incomplex dynamic settings.
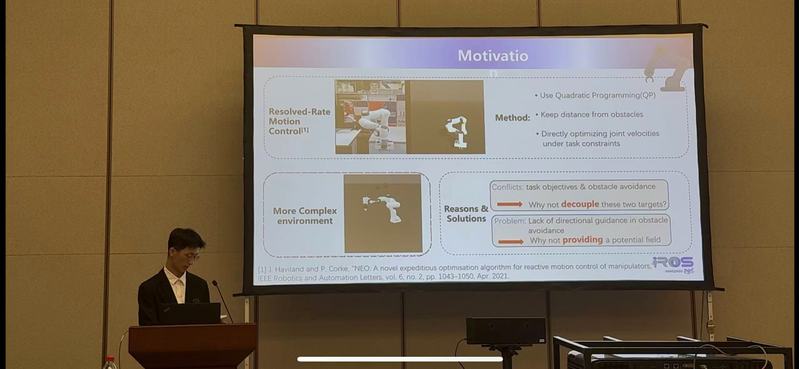
Lin Hangyu Delivering Oral Presentation
Professor Zhong Yong served as chair of the “Mechanisms and Control” session. His doctoral student Liu Haoran presented an adjustable continuum‑driven fish‑likethruster with tunable active/passive proportions. Experimental studies exploredthe dynamic matching between this proportion, tail stiffness, and oscillation frequency to optimize propulsion performance, providing a new solution for flexible underwater thrusters. The team also introduced a novel bio‑inspiredelectric‑ray robotic fish that innovatively combines MPF and BCF propulsionmodes, achieving both high‑speed movement and maneuverability while utilizingpectoral fins for underwater object grasping and transportation.

Associate Professor Zhou Yitong Presenting
Associate Professor Zhou Yitong delivered two compelling presentations. The first focusedon the frontier exploration of “Wearable Soft Exoskeleton Robotics,”introducing the group’s achievements in flexible exoskeletons for hand and wrist rehabilitation as well as for industrial tower‑climbing applications.This report received the Soft Frontier Speaker Award. In her second talk,titled “Design Method for 3D Variable‑Curvature Soft Actuators,” she addressed challenges and solutions in designing soft robots with complex 3D curvaturevariations. By controlling the spatial distribution of pre‑stress in softactuators, the method enables programmable curvature and stiffness. A softeagle‑claw gripper was further developed and integrated onto a drone, achieving hovering and aerial grasping with advantages such as low energy consumption,strong gripping force, and high coverage. The work was highly praised byattending experts.
Associate Professor Li Yunquan Presenting
Associate Professor Li Yunquan shared two recent research achievements in tactile perception and variable‑stiffness multimodal grasping: “A Compact,Cost‑Effective, and Highly Sensitive Optical Blocking Structure (OBS) Tactile Sensor for Enhanced Robotic Grasping” and “Autologous Variable‑Stiffness Soft Finger Based on Cross‑Layer Jamming for Multimode Grasping.”The presentations highlighted the technical strengths of the proposed OBS tactile sensor in structural simplicity, sensitivity improvement, and grasping stability, as well as the performance of the self‑adaptive variable‑stiffness soft finger based on inter‑layer jamming in complex multimodal grasping tasks.The following discussion was lively, with scholars engaging in in‑depth exchanges on sensor integration design, structural actuation strategies, and potential application scenarios, further demonstrating the school’slatest advances in flexible tactile perception and bio‑inspired robotics.
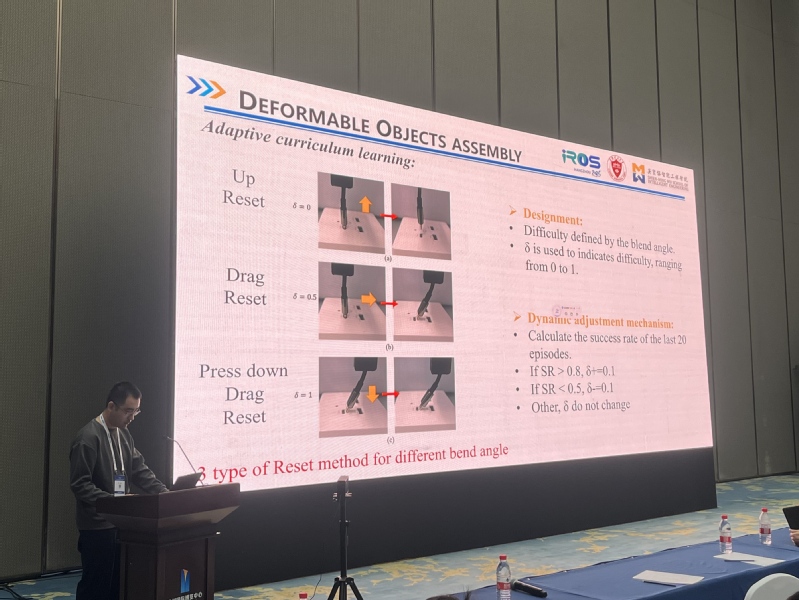
Chen Qi Giving Oral Presentation
The paper “Robotic Assembly of Deformable Linear Objects via Curriculum Reinforcement Learning” by Associate Professor Wu Kai’s team was presented atIROS 2025. Doctoral student Chen Qi delivered an oral presentation explainingthe challenges of flexible cable assembly and the application of curriculum reinforcement learning to this task. During the poster session, she engaged inextensive academic exchanges with peers, showcasing the school’s latest progress in embodied learning for fine‑grained manipulation.
LiuSuqi Delivering Oral Presentation
Doctoral student Liu Suqi from Associate Professor Wang Heng’s team presented an oral report titled “A Six‑Degree‑of‑Freedom Wireless Magnetic Localization System Based on Soft Magnets.”By designing a tri‑axis asymmetric soft‑magnet shape, the system enable sanisotropic magnetization under electromagnetic coil excitation, allowing thesoft magnet’smagnetic field to respond to rotational motion. Full 6‑DOF pose estimation isachieved through magnetic field measurements. This soft‑magnet localization system combines the advantages of traditional permanent‑magnet andelectromagnetic systems, offering a passive, wireless, radiation‑free, and interference‑resistant magnetic localization method with broad application prospects in minimally invasive surgical navigation.
Through this conference, faculty and students of the Wusic demonstrated outstanding innovative research and technological strength in robotics and intelligent manufacturing. Moving forward, the school will build on this foundation,aligning with the university’s goal of accelerating into the global top‑100 andthe school’sown disciplinary development objectives. It will continue to optimize itsdistinctive “156+X”interdisciplinary cluster, strengthening technological innovation and real‑world implementation across industrial applications such as smartmanufacturing, healthcare, transportation, agriculture and forestry, and low‑altitude economy. These efforts will further support the university’s “DoubleFirst‑Class”initiative and contribute to high‑level technological self‑reliance and advancement.(Textand images / Shien-Ming Wu School of Intelligent Engineering)
