2026年3月23日,课题组在SCI一区期刊Ocean Engineering上发表了题为“Sea trial of anti-rolling performance of a zero-speed ship model in coastal waves using PPO-based reinforcement learning control of flapping fins”的最新研究成果。华南理工大学土木与交通学院的邹远停为论文第一作者,导师焦甲龙为通信作者。论文链接:https://doi.org/10.1016/j.oceaneng.2026.125195
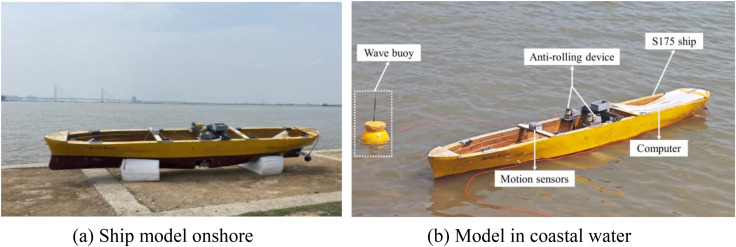
本文设计、制造并组装了一艘配备拍动式减摇鳍装置的集装箱船模型。基于深度强化学习,采用近端策略优化(PPO)算法实现减摇鳍装置的实时拍动轨迹控制。在已有水池模型实验基础之上,通过海上试验测量研究验证了船舶模型在真实近海浪况下的减摇性能。分析了不同海浪条件下船舶运动状态与鳍状减摇装置的控制轨迹。所研发的减摇系统与测试方案适用于提升船舶在近海浪况下的横摇稳定性。开展的海上试验测量及获取数据表明,基于PPO的减摇方案能有效降低船舶在各类真实海浪条件下的横摇运动。
该试验由本科生与硕士生共同协作完成,形成了良好的科研合作机制,培养了学生的实践能力。此外,充分利用了广州的近海自然环境资源,更好地服务于学习与科研工作,跳出了实验室的环境限制。
船模试验建立
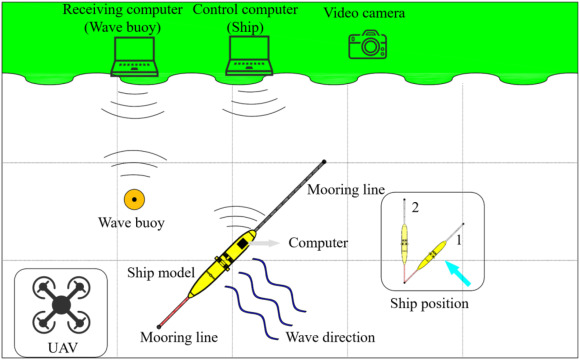

海上试验流程 试验过程航拍


试验团队合影 模型岸上调试