2025年1月3日,课题组在SCI一区期刊Ocean Engineering上发表了题为“Study on the intelligent anti-roll control of a ship at zero speed based on flapping fins”的研究成果。华南理工大学土木与交通学院的徐文华博士后为论文第一作者,华南理工大学为第一单位,哈尔滨工程大学为合作研究单位。论文链接:https://doi.org/10.1016/j.oceaneng.2024.120263
论文研究了基于深度强化学习(DRL)的拍动翼减摇稳定器零速控制系统。建立了一个集成了强迫横摇运动装置、横摇姿态传感和拍动鳍稳定装置的实验系统。通过运动质量块来实现不同振幅和频率的船舶横摇运动。采用近端策略优化(PPO)算法,通过规划拍动鳍稳定装置的运动轨迹来学习减摇控制策略。对PPO减摇控制模型进行了训练和测试。实验结果表明,训练好的PPO模型可以显著减少横摇运动。横摇幅度减小70%以上,在中等横摇频率下,最大横摇减摇效率超过90%。
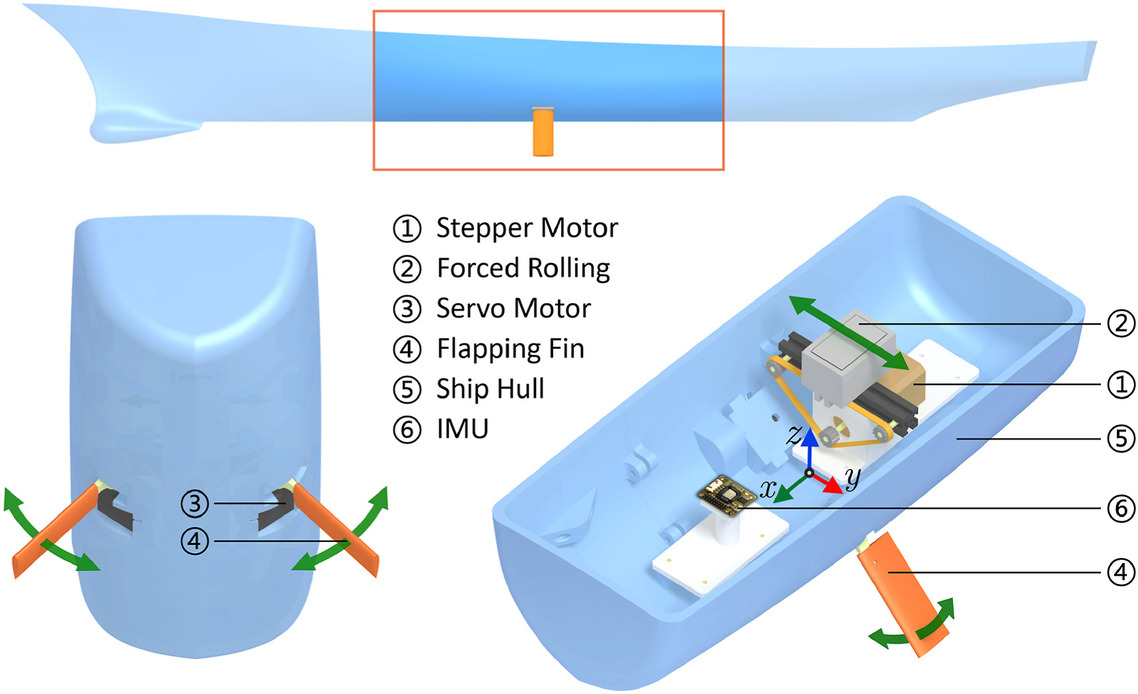
横摇运动控制的试验模型建立
该项工作获得了国家自然科学基金等项目和经费的支持。Ocean Engineering期刊由出版商Elsevier BV.以半月刊形式出版发行,影响因子4.6,在海洋领域位于Q1区。