Equipment introduction: The research platform for magnetically controlled medical robots mainly consists of multi-axis electromagnetic coils, optical and electromagnetic positioning system, various types of microscopes, and multi-axis precise force/torque sensors. This platform can be used for experimental investigation of magnetic actuation and manipulation of various minimally invasive medical robots including flexible transluminal robots, capsule endoscopes, and micro/nano robots (swarms). The research by this platform is aimed at enabling dexterous manipulation and autonomous navigation of minimally invasive medical robots inside the human body.
Equipment introduction: The all-terrain quadruped robot system includes large-size (B1), medium-size (AlienGo) and small-size (Go1Edu) quadruped robots. Large, medium and small quadruped robots have vision sensors to sense the environment. Large and medium-sized quadruped robots need a certain load capacity and obstacle-surmounting ability, while small quadruped robots move fast and agile. The system can be used as the school's mobile robotic platform to support teaching and research work on bionic robots, motion control algorithms, machine learning, and other related content.
Equipment introduction: The Smart bionic hand is the Shadow Hand Plus produced by Shadow Robot Company in the UK. It has a shape and function similar to a human hand and is the most dexterous bionic hand in the world. It has five fingers, each of which is individually controllable and has multiple controllable degrees of freedom. There are a total of 24 joints and 20 controllable degrees of freedom. It can imitate various movements of human hands and grasp objects of various sizes and shapes. With a certain load capacity, it can grab heavier objects. It has a variety of sensing functions, such as tendon tension, pressure tactile sensors, etc. The device can be used as the School's bionic hand platform to support the college's teaching and research work on bionic robots, human-computer interaction, service robots, grasping algorithms, and machine learning.
Equipment introduction: Robot Motion Control and Capture Platform (RMCC) is designed with the following two key robot control systems: 1 Autonomous Vehicles Research Studio(AVRS)system is equipped with work station, localization and motion capture system, 4-DOF multi-rotor drone, mobile robot, and other self-designed heterogeneous robots. The developer tools can be MATLAB, ROS, Mathematical, Maple. It can generate surrounding point cloud, rigid body tracking and robot motion captures. 2 Hydraulic Mobile Robot Manipulators Control System (HMRM): The robot is designed with multiple sensors such as LiDAR/Camera/IMU for multi-sensor information fusion, feedback control, SLAM research. Together with AVRS system, it can used for hydraulic multiple robots environment perception, motion planning, and distributed control developments.
Equipment introduction: The collaborative robot research platform has the characteristics of "security, easy programming, perceptual intelligence, and open source", which can be used as the core equipment of the laboratory. The manufacturer provides corresponding training courses to provide an important experimental carrier for students to learn robot ROS system, programming and development. At the same time, it is safe and easy to use, which provides a basis for students to operate robots in close proximity and human-computer interaction. Its open source feature provides a strong support platform for students' innovation and entrepreneurship, and students can do all kinds of learning development and academic research in their open ROS system.
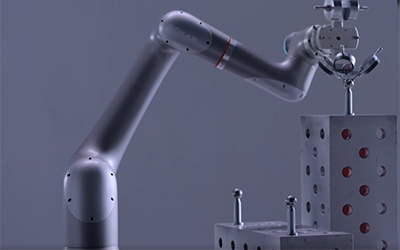
Equipment introduction: The seven-axis cooperative robot integrates the comprehensive upgrade of flexibility, safety, ease of use, flexibility and other cooperation characteristics, and also has the excellent industrial precision, speed and protection level of the core rigid characteristics, widely used in different industrial cooperation segmentation applications with strict requirements for rhythm and precision, to help realize a variety of complex process automation.