搜索
关闭
X
人才招聘
联系我们
English
首页
学院概况
about
学院简介
学院领导
行政办公
常设委员会
联系我们
师资队伍
FACULTY
师资概况
教师名录
博士后
人才招聘
人事服务
科研工作
科研中心
共享设备
研究成果
科研合作
人才培养
本科生教育
研究生教育
国际交流项目
国际交流
合作概况
学位项目
国际会议
党建园地
PARTY CONSTRUCTION
支部构成
理论学习
党务通知
党建动态
入党指南
信息中心
学院动态
通知公告
视频中心
学术活动
支持我们
GIVING
×
人才招聘
联系我们
English
首页
学院概况
学院简介
学院领导
行政办公
常设委员会
联系我们
师资队伍
师资概况
教师名录
博士后
人才招聘
人事服务
科研工作
科研中心
共享设备
研究成果
科研合作
人才培养
本科生教育
研究生教育
国际交流项目
国际交流
合作概况
学位项目
国际会议
党建园地
支部构成
理论学习
党务通知
党建动态
入党指南
信息中心
学院动态
通知公告
视频中心
学术活动
支持我们
科研工作
科研工作
科研中心
共享设备
测量与表征设备
机器人研究设备
制造研究设备
数据采集与计算设备
软件设备
研究成果
科研合作
数据采集与计算设备
首页
/
科研工作
/
共享设备
/
数据采集与计算设备
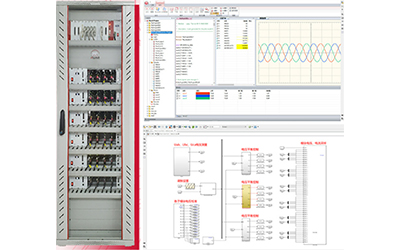
模块化多电平变流器
Modular Multilevel Converter
管理员:黄智聪
设备介绍:
以RTUNIT Studio图形化可发软件为核心,RTU-BOX主控制器,RTM功率模块搭建而成的MMC系统。
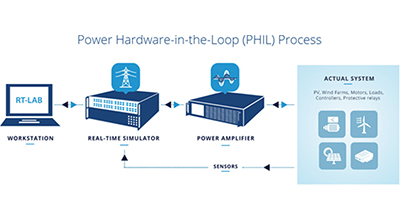
功率硬件在环实时仿真系统
Ppower Hardware-in-loop Real-time Simulation System
管理员:黄智聪
设备介绍:
功率硬件在环实时仿真系统由功率电路和实时仿真机组成。
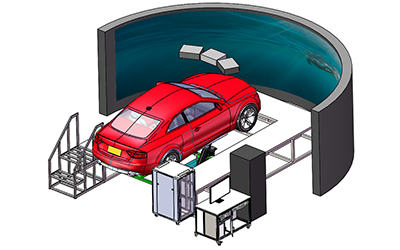
驾驶模拟系统
Driving simulation system
管理员:林远
设备介绍:
驾驶模拟系统包含实时模块、交通场景泛化系统、六自由度平台、HIL实时机系统、智能驾驶测试车、车载数据采集系统等组成,该系统能够将六自由度运动平台与交通场景泛化系统结合到一起,将虚拟车辆所处的动态交通场景、运动视景、运动姿态、驾驶员及乘客的真实感受和响应,以及ADAS/自动驾驶系统的真实反馈有机结合,实现对ADAS、自动驾驶及人机界面(HMI)的研究与测试。
Supermicro 高性能计算机
Supermicro High Performance Computer
管理员:曾子倩
设备介绍:
Supermicro 高性能计算机能加速处理各类云任务,包括高性能计算、深度学习的训练和推理,机器学习,数据分析和图形处理。
智能座舱系统
Intelligent Cockpit System
管理员:李巍华
设备介绍:
智能座舱系统主要包含HMS V数字人工头和便携式数采前端SQuadriga III,可实现噪声质量及语音质量测试与评价。HMS V数字人工头具有高灵活性、易用性以及技术先进等特点,其与SQuadriga III相连接,构成了一个综合测量系统。该系统可用于智能车辆噪声环境采集及模拟、整车声品质主客观评价、ASD声浪设计、音效评估等方面的研究。
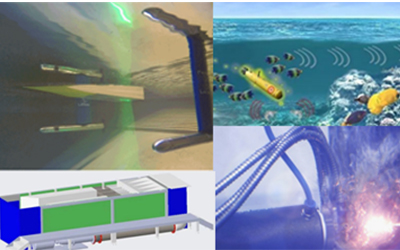
水下装备研发与测试综合平台(跨尺度流体激光测量系统+智能造波造浪系统+压力舱测试系统+水下多传感器平台+万瓦水下激光制造)
Integrated platform for underwater equipment R&D and testing
管理员:钟勇
设备介绍:
流体激光测量系统可用于风洞水洞流场测量,有利于分析仿生机器人外形设计及流体相关特性等。跨尺度流体激光测量系统是一种非接触的激光成像流场测量法,可获得3维流场分布信息,有助于实验结果的深入分析。智能造流、造浪系统可以产生0-1m/s的稳定流场,以及各种不同的波浪,用于测试水下仿生机器人和作业水下机器人等的流场特性,以及研究在波浪环境中的智能控制方法。压力舱测试系统可对水下0-1500米工作深度的深海设备或核心零部件进行耐压测试,开发与测试深海机器人核心耐压部件,测试和监控深海水下激光制造全过程。水下多传感器平台具有DVL、高精密惯导、各种声呐、水下相机、压力传感等,用于研发深海智能水下机器人,服务于国家海洋经济与防卫事业。大功率激光加工系统主要包括激光光源、双光路光闸、操作光纤、水下激光焊接头、激光熔覆头、水冷机及配套备品备件等。该系统可用于多种材料的激光修复快速成型制造和水下激光焊接加工制造。
光栅传感解调仪
Grating Sensing Demodulation Instrument
管理员:周奕彤
设备介绍:
光栅传感解调仪是一种多带宽解调仪,适合于应变、温度、位移等多种类型光纤光栅(FBG)传感器。可应用于航空航天、能源、交通工程、科研等领域。
红外热像仪
HD performance infrared camera
管理员:高娇
设备介绍:
T1050sc是一款便携式高速高清红外热像仪,能够以每秒30帧的速度记录1024×768全分辨率图像。它是专门为科研人员设计的,内载动力电池,可以满足通过手持的方式在灵活场景中的高分辨率和高灵敏度的测试。它具有的敏感传感器和高清光学器件可以提供精确的热图像,实现温度的非接触测量。
动作捕捉系统
Motion Capture System
管理员:周奕彤
设备介绍:
动作捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备。它基于计算机图形学(传感器技术)原理,通过排布在空间中的数个视频捕捉设备(传感器)将运动物体的运动状况以图象的形式记录下来,然后使用计算机对数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标(X,Y,Z)。
六维力/力矩传感器
Six Dimensional Force/Moment Sensor
管理员:周奕彤
设备介绍:
六轴力传感器是一种特殊的力传感器,能够同时测量中性坐标系(OXYZ)内的三个力(FX、FY、FZ)和三个矩(MX、MY、MZ)。可用于产品测试、机器人组装、研磨、抛光和其他需要保持稳定位置和轨迹的高重复性的工业应用。