search
Close X



FACULTY


|
Wang, Heng
Positional Title: Associated Professor
Email: wanghengscut@scut.edu.cn
Working For: Shien-Ming Wu School of Intelligent Engineering
Graduated School: University of Minnesota,Twin Cities
Final Degree: Ph.D.
Office: D1-a505
Zip Code: 510640
Telephone:
Mentor Type:
Personal profile
Heng Wang received the bachelor’s degree from Xi’an Jiaotong University, China, in 2016. He received the Ph.D. degree in Mechanical Engineering from University of Minnesota, Twin Cities, USA, in 2021. Dr. Wang is currently an Associate Professor with the Shien-Ming Wu School of Intelligent Engineering, South China University of Technology, Guangzhou, China. His research topic is magnetically navigation of medical robots, which includes magnetic motion tracking and actuation, intra-body pose tracking and shape sensing of minimally invasive medical robots, dexterous manipulation and autonomous navigation of magnetic robots, AI enabled motion planning and navigation of medical robots, medical VR/AR and human-machine interaction, simulation-based design platforms for medical robots. Dr. Wang is a principal investigator of multiple research projects funded by National Natural Science Foundation of China, Department of Science and Technology of Guangdong Province, and Guangzhou Municipal Science and Technology Bureau. He has also completed multiple research projects as a major participant funded by US National Science Foundation, University of Minnesota, Case New Holland Inc., and Chinese Academy of Sciences. Dr. Wang received the honor of Editor’s Highlight paper (Best 50 papers) in “Applied Physics and Mathematics” in Nature Communications, Best Application Paper Award in the 2022 IEEE International Conference on Digital Twins and Parallel Intelligence, and the Best Paper Award in 2020 from the Mechatronics Technical Committee of American Society of Mechanical Engineers. He received the Doctoral Dissertation Fellowship from University of Minnesota in 2020. Dr. Wang was granted a US patent and published research papers in renowned journals and conferences such as Nature Communications/IEEE TMECH/IEEE Sensors J./MSSP/IEEE Robotics and Automation Lett./ICRA/ACC, etc.
Work Experience
2021.9 to Present, Associate Professor, Shien-Ming Wu School of Intelligent Engineering, South China University of Technology, Guangzhou, China.
Education
2012 - 2016, Xi’an Jiaotong University, School of Energy and Power Engineering, B. Eng.
2019 – 2021, University of Minnesota, Twin Cities, Department of Electrical and Computer Engineering, M.S.
2019 – 2021, University of Minnesota, Twin Cities, Department of Mechanical Engineering, Ph.D.
Research Interest
Magnetically Navigation of Medical Robots;Magnetic Motion Tracking and Actuation;Intra-body Pose Tracking and Shape Sensing of Minimally Invasive Medical Robots;Dexterous Manipulation and Autonomous Navigation of Magnetic Robots;AI enabled Motion Planning and Navigation of Medical Robots;Medical VR/AR and Human-Robot Interaction;Simulation-based Design Platform for Medical Robots.
Research projects
Courses
Undergraduate Courses:
Analysis and Applications of Big Data in Industry, Fall 2021, 2022, 2023
Theory and Technology of Robotics, Spring 2022, 2023
Graduate Courses:
Frontiers in Intelligent Manufacturing, Fall 2021, 2022, 2023
Modern Sensing Technology and Uncertainty Theory, Fall 2022, 2023
Optimal Control and Reinforcement Learning, Spring 2022
Rewards and Awards
[1] “Three-degrees-of-freedom Orientation Manipulation of Small Untethered Robots with a Single Anisotropic Soft Magnet,”获Nature Communications 期刊“应用物理与数学”领域亮点文章(领域最佳50篇),2023
[2] “Identification of Workspace of the Soft-magnet Based Position Tracking System for Medical Robots Using Parallel Experiments”, Best Application Paper Award in 2022 International Conference on Digital Twins and Parallel Intelligence (Corresponding Author)
[3] “Electromagnetic Position Estimation Using Active Current Control and Nonlinear Observer”, Best Paper Award in 2020 from ASME Mechatronics Technical Committee (First Author)
[4] “Electromagnetic Position Estimation Using High-Magnetic-Permeability Materials: Design, Modeling, and Applications”, Doctoral Dissertation Fellowship in 2020 from University of Minnesota
Selected Publications
2024
[1] S. Dong, H. Wang, “A Compact and Robust 6-DoF Pose Tracking System Using Magnetic-Inertial Sensors and a Single Uniaxial Electromagnetic Coil”, IEEE Sensors Journal, 2024 (JCR Q1, IF 4.3, Early Access)
[1] H. Wang*, J. Cui, K. Tian, Y. Han, 'Three-degrees-of-freedom orientation manipulation of small untethered robots with a single anisotropic soft magnet', Nature Communications, vol 14, no. 1, 7491, Nov. 2023. (Nature Index Journal, JCR Q1, IF 16.6)
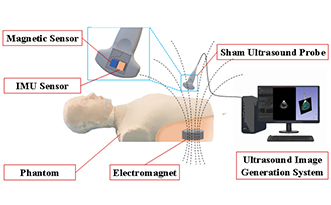
[2] H. Wang, S. Dong, Q. Yang, J. Han, Z. He, Y. He, S. Wang, 'A virtual ultrasonography simulator for skill training using magnetic-inertial probe tracking,' IEEE/ASME Transactions on Mechatronics, June 2023. (JCR Q1, IF 6.4)
[3] Y. Shen, S. Dong, D. Liu, K. Zhang, H. Wang*, 'Active 6-DoF Electromagnetic Pose Tracking Using Orientation Control of the Magnetic Source', IEEE International Conference on Robotics and Biomimetics (ROBIO), 2023.
[1] T. Wen, H. Wang*, “Identification of Workspace of the Soft-magnet Based Position Tracking System for Medical Robots Using Parallel Experiments,” IEEE Journal of Radio Frequency Identification (also reported on DTPI 2022), vol 6, pp. 987-992, 2022.
[2 T. Wen, H. Wang, “Identification of Workspace of the Soft-magnet Based Position Tracking System for Medical Robots Using Parallel Experiments,” IEEE Journal of Radio Frequency Identification (also reported on DTPI 2022), 2022. (Early Access)
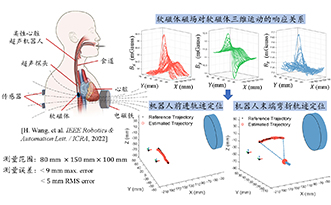
[3] H. Wang, S. Wang, H. Liu, K. Rhode, Z. G. Hou, R. Rajamani, “3-D Electromagnetic Position Estimation System Using High-Magnetic-Permeability Metal for Transluminal Continuum Medical Robots”, IEEE Robotics and Automation Letters (also reported on ICRA 2022), vol. 7, no. 2, pp. 2581-2588, 2022. (JCR Q2, IF 4.3)
[4] H. Wang, A. Zemouche and R. Rajamani, “Nonlinear Observer for Electromagnetic Position Estimation Using Active Current Control”, Mechanical Systems and Signal Processing, vol. 167. 108449, 2022 (JCR Q1, IF 8.9)
[5] H. Wang, S. Wang, R. Rajamani, “Electromagnetic Angular Position Sensing Using High-Magnetic-Permeability Materials”, IEEE Sensors Journal, vol. 22, no. 12, pp. 11626-11636, 2022. (JCR Q1, IF 4.3)
[1] H. Wang and R. Rajamani, “Electromagnetic Position Estimation Using Active Current Control and Nonlinear Observer”, Proceedings of the American Control Conference (ACC), Denver, 2020.
2019年
[1].H. Wang, R. Madson and R. Rajamani, “Electromagnetic Position Measurement System Immune to Ferromagnetic Disturbances”, IEEE Sensors Journal, vol. 19, no. 21, pp. 9662-9671, July 2019. (JCR Q1,IF 4.3)
[2].H. Wang and R. Rajamani, “A Remote Position Sensing Method Based on Passive High Magnetic Permeability Thin Films”, Sensors and Actuators A: Physical, vol. 295, pp. 217-223, 2019. (JCR Q1,IF 4.3)
[3].H. Wang, H. Wang, J. Huang, B. Zhao and L. Quan, “Smooth Point-to-point Trajectory Planning for Industrial Robots with Kinematic Constraints based on High-order Polynomial Curve”, Mechanism and Machine Theory, vol. 139, pp. 284-293, 2019. (JCR Q1,IF 4.9)
[1].H. Wang, Y. Liu, P. Yang, R. Wu and Y. He, “Parametric Study and Optimization of H-type Finned Tube Heat Exchangers Using Taguchi Method”, Applied Thermal Engineering, vol. 103, pp. 128-138, 2016. (JCR Q1,IF 6.5)
2023
2022
2020
2016
Patents
[1].H. Wang, R. Rajamani and R. Madson, “Position Sensing System with an Electromagnet”, US Patent 10837802, 2020. (Issued)
