The 6th Fractional Order Mechatronics System and Control Seminar was successfully held on December 29, 2025, at the Center Conference Room, 11th Floor, Liwu Building, South China University of Technology (SCUT). The seminar was sponsored by the Fractional System and Control Professional Committee of Chinese Association of Automation, and organized by the School of Automation Science and Engineering at South China University of Technology. The offline academic sessions of this seminar would continue until January 2, 2026.

Conference Group Photo
The seminar featured renowned experts and scholars from both domestic and international institutions, including Professor Stephane Victor from the University of Bordeaux, Professor YangQuan Chen from the University of California, Merced, and Dr. Wang Shaohua from The Chinese University of Hong Kong, among others. Each guest delivered thematic presentations on various aspects of Fractional Order Mechatronics System and Control, sharing their latest findings, research outcomes, and related reflections. The conference was chaired by Professor Luo Ying from South China University of Technology.

Opening Ceremony of the Seminar
Professor YangQuan Chen from the University of California, Merced, gave a presentation titled Roughness-informed machine learning by fractal and fractional calculi. The presentation emphasized that the future development of machine learning should not be limited to physics-informed approaches but must evolve toward complexity-informed methodologies. By establishing the theoretical framework of Inverse Power Law-Complexity-Fractional Calculus, the presentation systematically elaborated on the necessity of fractional calculus in machine learning. It highlighted how fractional calculus and fractal calculus jointly play a pivotal role in characterizing the tail behavior of systems, which critically influences model performance. Building on this, the Exponential Law (EL), Stretched Exponential Law (SEL), and Inverse Power Law (IPL) can be integrated into a unified mathematical modeling framework. The presentation particularly underscored the significance of roughness as a key representation of complexity in machine learning. Research indicates that machine learning algorithms capable of actively perceiving and incorporating roughness information significantly outperform traditional methods that overlook system complexity.

Professor YangQuan Chen's Presentation
Dr. Wang Shaohua from The Chinese University of Hong Kong, gave a presentation titled Fractional-order resetting-based active disturbance rejection control for permanent magnet synchronous motors. Focusing on permanent magnet synchronous motors (PMSMs), the presentation outlined the limitations of traditional linear controllers in high-performance servo applications. To address these challenges, the presentation proposed a Fractional-Order Full-Reset Active Disturbance Rejection Control strategy (FOFR-ADRC) for PMSM speed regulation. This method involves designing a novel fractional-order full-reset Clegg integrator embedded within an ADRC framework, effectively addressing common oscillation and limit cycle issues in conventional control. Additionally, frequency-domain analysis demonstrated reduced phase lag and enhanced control bandwidth. Experimental validation showed that, compared to traditional control methods, this strategy significantly improves transient response, overshoot suppression, disturbance rejection capability, and parameter robustness. The presentation systematically progressed from methodology design and simulation verification to experimental analysis, providing a solution of both theoretical and practical value for high-performance PMSM control.

Dr. Wang Shaohua's Presentation
Dr. Su Yijian, a doctoral student under Professor Wang Xiaohong from South China University of Technology, gave a presentation titled Disturbance and Vibration Suppression of A Dual-Inertia Servo System with Fractional-Order Model. The presentation began by introducing the establishment of a fractional-order model for dual-inertia systems, where the incorporation of fractional calculus enhanced the precision in characterizing system dynamic behaviors. Building on this foundation, a sliding mode observer was designed to accurately estimate system state variables, providing essential information for subsequent control. To address issues of disturbance and vibration in the system, the presentation further proposed a comprehensive control strategy: first, a compensation method was employed to transform the system into a triple-integrator form, achieving disturbance decoupling; subsequently, a cascaded controller was designed and parameters were tuned accordingly, effectively suppressing external disturbances and mechanical vibrations. Simulation results demonstrated that this strategy significantly reduces the amplitude of system disturbances and vibrations, exhibiting superior dynamic performance and control robustness. This research provides new theoretical support and technical approaches for the design of high-precision servo systems and vibration suppression.
Dr. Su Yijian's Presentation
Professor Stephane Victor from the University of Bordeaux, gave a presentation titled From system identification to optimal and robust control of fractional systems: Application to thermal systems. The presentation systematically elaborated on the full research pipeline for fractional systems, spanning from modeling to control. It began by outlining the fundamental theories and stability conditions of fractional system descriptions. Building on this foundation, the presentation introduced systematic identification methods based on non-integer models and proposed two optimal estimators. The study further detailed the application of these methods to thermal system identification, establishing the dynamic relationship between temperature and heat flux density. By integrating flatness principles, the research achieved temperature path planning. Additionally, the use of a third-generation CRONE controller enhanced the robustness of path tracking under disturbances and uncertainties. Experimental validation on a thermal system demonstrated that this framework effectively realizes a closed-loop research process from system identification and path planning to robust control. It provides a systematic solution for the application of fractional system theory in engineering domains such as thermal process control.
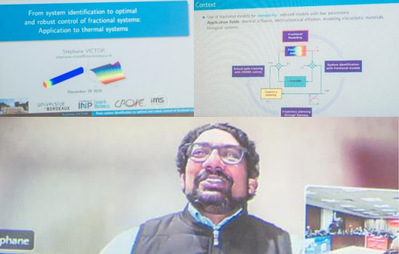
Professor Stephane Victor's Presentation
Professor Luo Ying from South China University of Technology, gave a presentation titled Fractional order Motion Systems and Control with Application Prospects in Exoskeleton Robotics. The presentation pointed out that, as motion system control advances toward higher precision and stronger robustness, fractional calculus offers new theoretical tools for system modeling and control, leveraging its advantages such as tunable order and multi-scale characterization. The presentation summarized the key progress made by the research group in fractional-order modeling and control of precision motion systems. This includes establishing accurate fractional-order models for mechanical, electrical, thermal, and coupling characteristics, along with proposing novel system parameter identification methods. The research also designed a series of fractional-order controller structures and frequency-domain integrated schemes, effectively enhancing the system's tracking performance and disturbance rejection capabilities. During the application demonstration segment, the presentation focused on the field of exoskeleton robotics. It systematically introduced the research conducted by the group on hip and knee exoskeleton robots, with an on-site demonstration of the experimental prototype. The analysis highlighted the significant advantages of fractional-order control methods in the motion control of robotic joints, showcasing their broad application prospects.

Professor Luo Ying's Presentation
The seminar successfully brought together numerous experts, scholars, and graduate students from various fields, facilitating exchanges through a hybrid format combining online and offline participation. During the event, keynote speakers and attendees engaged in lively and in-depth discussions. Participants actively interacted, shared their latest research findings, and inspired each other through extensive communication, effectively achieving the symposium's established objectives. This event not only deepened participants' understanding of fractional-order mechatronic systems and control but also opened up new avenues for future research. The related outcomes are expected to positively impact the future development of industry and technology, contributing to the continuous advancement of technological innovation.

Closing Ceremony Remarks
