AU讲座——Satellite Attitude Control Designs in Presence of Reaction Wheel Faults/Failures
 |  |
| 嘉宾介绍 | 嘉宾讲解 |
 |  |
| 观众听讲 | 合影留念 |
2016年12月8日上午10:30,由华南理工大学自动化科学与工程学院举办的AU讲堂系列学术讲座:Satellite Attitude Control Designs in Presence of Reaction Wheel Faults/Failures,在3号楼6楼会议室举行。本期讲座邀请到来自新加坡南洋理工大学的Danwei Wang教授作为主讲嘉宾,讲座由自动化学院裴海龙教授主持。
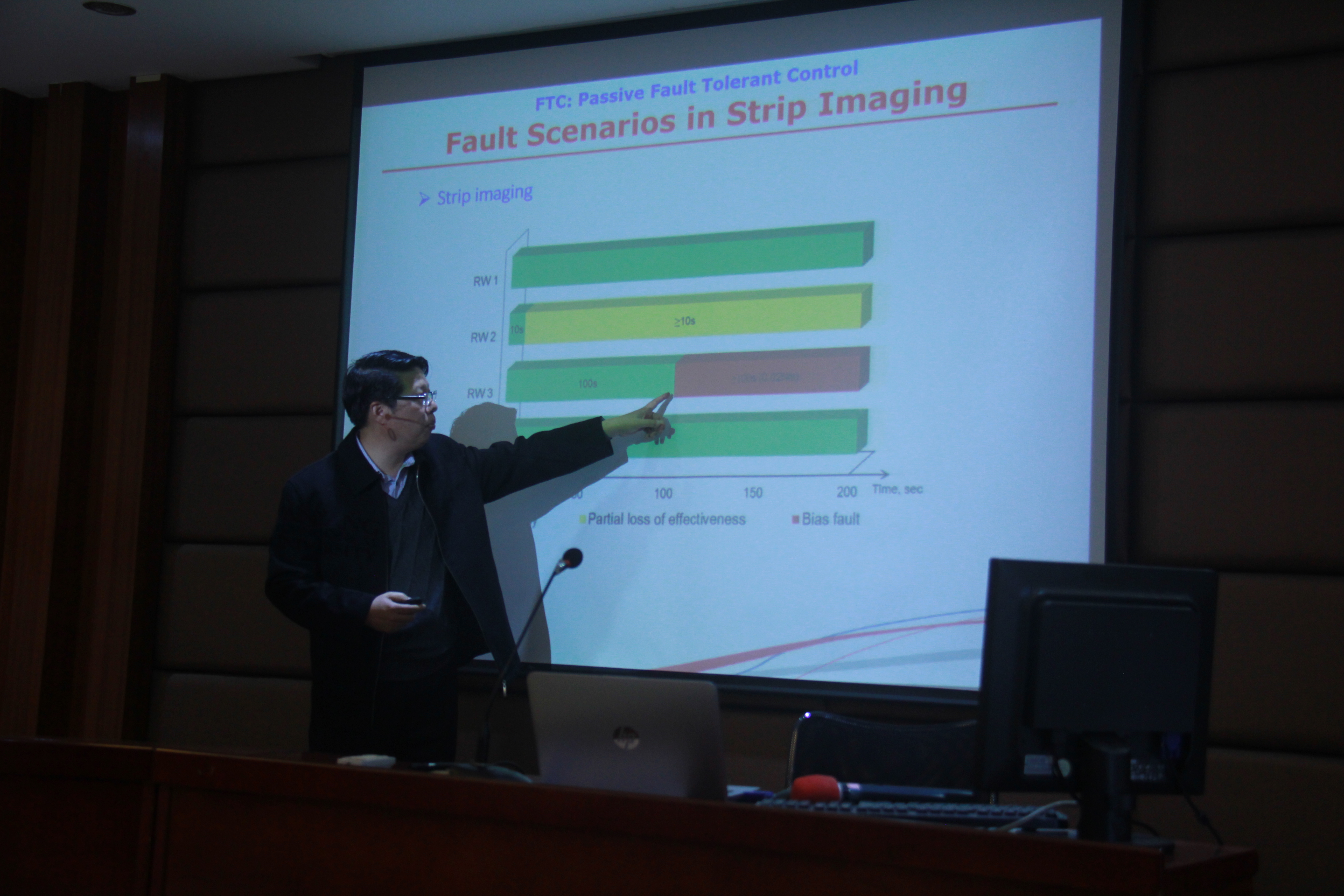
讲座开始前,裴海龙教授对Danwei Wang教授作了简要的介绍,Danwei Wang教授分别于1989年和1985年取得密歇根大学博士和硕士学位,于1982年在华南理工大学取得学士学位。目前,他是新加坡南洋理工大学电气与电子工程学院的教授。Danwei Wang教授在讲座过程中首先介绍了卫星姿态控制系统的一些特点以及相应的背景知识,随后指出了姿态控制系统中的关键执行机构反作用飞轮,以及其常见的失效和偏差问题。针对上述问题,Danwei Wang教授讲述了两种控制方式,一种是被动容错控制,另一种是主动容错控制。同时结合相应案例阐述两种方式的特点与差异。讲座最后,Danwei Wang教授与同学和老师就相关问题进行了积极的讨论。
本次讲座丰富了同学们的知识,扩展了同学们的视野,激发了同学们的兴趣。通过本次讲座,同学们再一次感受到了控制理论应用领域之广以及控制理论在解决实际问题时发挥的重要作用,坚定了同学们努力科研的决心。
(图/文,张伟东)