第六届分数阶机电一体化系统与控制研讨会成功举办
2026-01-05
2025年12月29日,第六届分数阶机电一体化系统与控制研讨会在华南理工大学励吾楼 11 楼中心会议室顺利召开。会议由中国自动化学会分数阶系统与控制专业委员会主办,华南理工大学自动化科学与工程学院承办。本次研讨会线下学术研讨活动持续至2026年1月2日。

会议合影
本次研讨会邀请到国内外的著名专家学者包括 University of Bordeaux(波尔多大学)Stephane Victor 教授,University of California.Merced(加州大学默赛德分校)YangQuan Chen 教授和香港中文大学王少华博士等。嘉宾们分别做了分数阶机电一体化系统与控制相关的主题报告,分享他们最新的发现、研究成果与相关思考。大会由华南理工大学罗映教授主持。

YangQuan Chen教授报告
香港中文大学王少华博士做题为“基于分数阶重置的永磁同步电机自抗扰控制”的报告。报告以永磁同步电机(PMSM)为研究对象,概述了传统线性控制器在高性能伺服应用中面临的局限。为此,报告提出了一种用于PMSM速度调节的分数阶全复位主动扰动抑制控制策略(FOFR-ADRC),该方法通过设计新型分数阶全重置Clegg积分器,并将其嵌入自抗扰控制框架,有效解决了常规控制中的振荡与极限环问题,同时在频域分析中表现出相位滞后减小、控制带宽提升的特点。实验验证表明,相比传统控制方法,该策略在瞬态响应、超调抑制、抗扰能力及参数鲁棒性等方面均表现出显著改善。报告从方法设计、仿真验证到实验分析层层展开,为高性能永磁同步电机控制提供了具有理论和实践价值的解决方案。

王少华博士报告
华南理工大学王孝洪教授的学生苏以鉴博士做题为“双惯量伺服系统分数阶建模及扰动抑制研究”的报告。报告首先介绍了双惯量系统的分数阶模型的建立,通过引入分数阶微积分提高了系统动态特性的刻画精度。在此基础上,通过构建滑模观测器,准确估计系统状态变量,为后续控制提供必要信息。针对系统存在的扰动与振动问题,报告进一步提出一套完整的控制策略:先通过补偿方法将系统转化为三重积分形式,实现扰动解耦;随后设计级联控制器,并完成参数整定,从而有效抑制外部扰动与机械振动。仿真结果表明,该策略能显著降低系统扰动与振动幅度,表现出优越的动态性能与控制鲁棒性。该研究为高精度伺服系统的设计与振动抑制提供了新的理论支持与技术途径。

苏以鉴博士报告
波尔多大学Stephane Victor教授做题为“From system identification to optimal and robust control of fractional systems: Application to thermal systems”的报告。报告系统阐述了分数阶系统从建模至控制的全流程研究。报告首先概述了分数阶系统描述的基本理论与稳定性条件,并在此基础上系统介绍了基于非整数模型的系统辨识方法,提出了两种最优估计器。随后介绍该研究基于分数阶模型完成了热系统辨识,建立了温度与热通密度的动态关系,并进一步结合平坦性原理实现了温度路径规划,利用第三代CRONE控制器提升了路径跟踪在扰动与不确定性下的鲁棒性。通过热系统实验验证,该框架有效实现了从系统辨识、路径规划到鲁棒控制的闭环研究流程,为分数阶系统理论在热工控制等工程领域的应用提供了系统化解决方案。
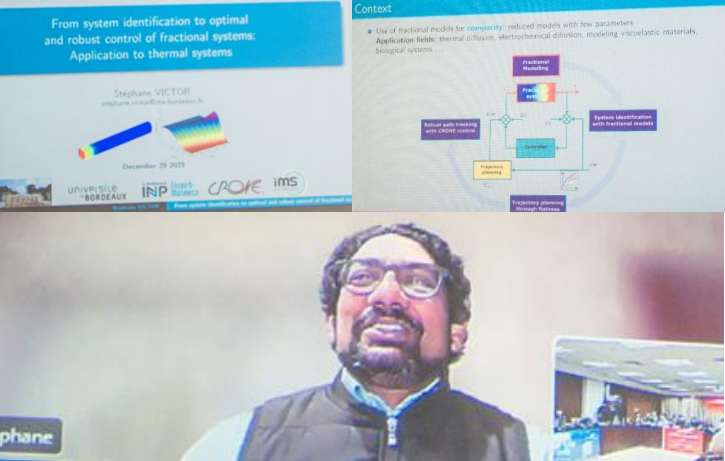
Stephane Victor教授报告
华南理工大学罗映教授做题为“分数阶运动系统与控制及外骨骼机器人应用展望”的报告。报告指出,随着运动系统控制向更高精度、更强鲁棒性方向发展,分数阶微积分凭借其阶次可调、多尺度刻画等优势,为系统建模与控制提供了新的理论工具。报告总结了课题组在精密运动系统分数阶建模与控制方面取得的核心进展,包括建立针对机、电、热及耦合特性的精确分数阶模型,并提出新的系统参数辨识方法。研究还设计了一系列分数阶控制器结构与频域集成方案,有效提升了系统的跟踪性能与抗扰能力。在应用展示环节,报告聚焦于外骨骼机器人领域,系统介绍了课题组在髋膝关节外骨骼机器人方面的研究内容,并现场展示了实验原型机,分析了分数阶控制方法在该类机器人关节运动控制中所表现出的显著优势,展现出广阔的应用前景。

罗映教授报告
本次研讨会成功汇聚了许多来自不同领域的专家学者及研究生,通过线上与线下相结合的方式展开交流。会上,报告专家与参会师生进行了热烈而深入的讨论。与会者积极互动,分享了最新研究成果,在充分交流中相互启发,有效实现了研讨会设立的目标。此次活动不仅深化了大家对分数阶机电一体化系统与控制领域的认识,也为后续研究开拓了新思路。相关成果预计将对工业与科技的未来发展产生积极影响,助力科技创新持续向前推进。

闭幕式致辞