负责人:姚锡凡教授
联系邮箱:mexfyao@scut.edu.cn
成果简介:
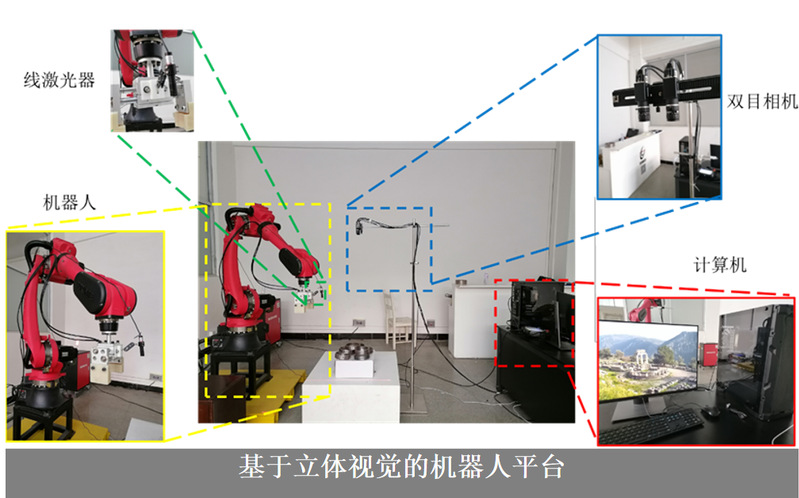
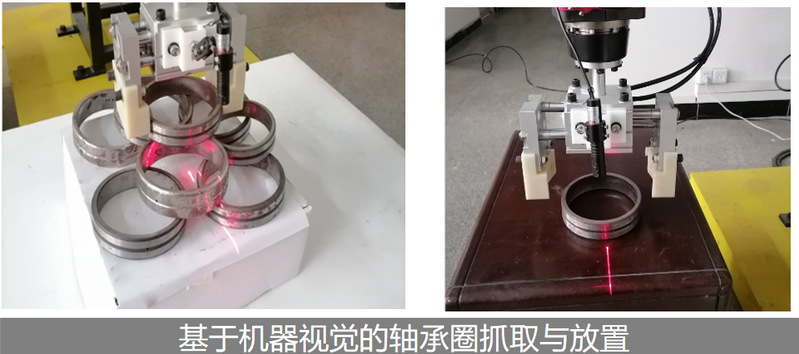
项目提出了一种基于双目与线激光的新型立体视觉算法。该算法包括基于双目立体视觉的预定位、根据预定位结果投射线激光以及基于双目线激光的精定位等部分;针对该算法在轴承圈夹取过程进行了精度与速度测试实验,实验中预定位所求出来的机器人基坐标系下x坐标误差绝对值的均值为1mm,精定位的x、y、z坐标误差绝对值的均值为1.16mm、2.05mm、2.26mm,位置误差远小于轴承圈尺寸;绕x、y轴欧拉角误差绝对值的均值为3.3°、3.8°,可满足轴承圈实际需求;运用所提出的算法连贯实现堆叠轴承圈识别、定位与抓取,验证了基于深度学习、双目与线激光的堆叠轴承圈识别、定位与抓取的构想。